[翻译]Sol - 从零开始的MQTT broker - 第二部分:网络
前言
让我们继续之前的工作,在第一部分中我们实现了 MQTT v3.1.1 的数据结构和解码函数,接下来我们需要做一些组包和编码函数,让我们可以发送网络包。
顺带说明一下,我们并没有打算去编写完美的或者内存效率很高的代码,而且,过早的优化是万恶之源,以后我们有的是时间来提高我们的代码质量。
组包实现
暂时我们只需要做 CONNACK SUBACK PUBLISH 包的组包工作,其他的各种 ACK 的结构都是一样的,之前我们已经用 typedef 让这些 ACK 引用了同一个函数。
union mqtt_header *mqtt_packet_header(unsigned char)函数用来处理 Fixed Header,以及以下这些只有 Fixed Header 的包:- PINGREQ
- PINGRESP
- DISCONNECT
struct mqtt_ack *mqtt_packet_ack(unsigned char, unsigned short)用来处理以下这些类ACK的包:- PUBACK
- PUBREC
- PUBREL
- PUBCOMP
- UNSUBACK
其余的包都需要专门的函数来组包。再说一次,虽然可能有很多更优雅的代码或者更优化的方法,但是现在我们只要写能用的代码就行了,以后迟早会优化的。
mqtt.c/* * mqtt组包 */ // 头部1byte的组包实现 union mqtt_header *mqtt_packet_header(unsigned char byte) { static union mqtt_header header; header.byte = byte; return &header; } // 各种ACK的组包实现 struct mqtt_ack *mqtt_packet_ack(unsigned char byte, unsigned short pkt_id) { static struct mqtt_ack ack; ack.header.byte = byte; ack.pkt_id = pkt_id; return &ack; } // CONNACK 组包实现 struct mqtt_connack *mqtt_packet_connack(unsigned char byte, unsigned char cflags, unsigned char rc) { static struct mqtt_connack connack; connack.header.byte = byte; connack.byte = cflags; connack.rc = rc; return &connack; } // SUBACK 组包实现 struct mqtt_suback *mqtt_packet_suback(unsigned char byte, unsigned short pkt_id, unsigned char *rcs, unsigned short rcslen) { struct mqtt_suback *suback = malloc(sizeof(*suback)); suback->header.byte = byte; suback->pkt_id = pkt_id; suback->rcslen = rcslen; suback->rcs = malloc(rcslen); memcpy(suback->rcs, rcs, rcslen); return suback; } // PUBLISH 组包实现 struct mqtt_publish *mqtt_packet_publish(unsigned char byte, unsigned short pkt_id, size_t topiclen, unsigned char *topic, size_t payloadlen, unsigned char *payload) { struct mqtt_publish *publish = malloc(sizeof(*publish)); publish->header.byte = byte; publish->pkt_id = pkt_id; publish->topiclen = topiclen; publish->topic = topic; publish->payloadlen = payloadlen; publish->payload = payload; return publish; } // 释放包资源 void mqtt_packet_release(union mqtt_packet *pkt, unsigned type) { switch (type) { case CONNECT: free(pkt->connect.payload.client_id); if (pkt->connect.bits.username == 1) free(pkt->connect.payload.username); if (pkt->connect.bits.password == 1) free(pkt->connect.payload.password); if (pkt->connect.bits.will == 1) { free(pkt->connect.payload.will_message); free(pkt->connect.payload.will_topic); } break; case SUBSCRIBE: case UNSUBSCRIBE: for (unsigned i = 0; i < pkt->subscribe.tuples_len; i++) free(pkt->subscribe.tuples[i].topic); free(pkt->subscribe.tuples); break; case SUBACK: free(pkt->suback.rcs); break; case PUBLISH: free(pkt->publish.topic); free(pkt->publish.payload); break; default: break; } }
编码实现
我们接下来处理编码函数,编码函数其实就是解码函数的反方向操作:我们使用内存对象创造一个字节流,之后可以通过socket发出去。
现在我们有一些函数返回指向 static struct 的指针(例如上方代码中的 mqtt_packet_header ),在单线程的情况下这是没什么问题的。 在多线程环境下,一定会出问题,每次这种函数的返回都会指向同一片内存区域,可能导致各种冲突。因此为了将来的改进,需要重构这些部分,使用 malloc 来为每次返回分配地址。
我们采用和之前解码函数一样的方式来映射编码函数。做一个静态数组,其中的序号恰好等于包类型。
src/mqtt.c// MQTT 编码函数接口 typedef unsigned char *mqtt_pack_handler(const union mqtt_packet *); // 编码函数数组, 其中索引和包类型id对应 static mqtt_pack_handler *pack_handlers[13] = { NULL, NULL, pack_mqtt_connack, pack_mqtt_publish, pack_mqtt_ack, pack_mqtt_ack, pack_mqtt_ack, pack_mqtt_ack, NULL, pack_mqtt_suback, NULL, pack_mqtt_ack, NULL }; // header 的编码实现 static unsigned char *pack_mqtt_header(const union mqtt_header *hdr) { unsigned char *packed = malloc(MQTT_HEADER_LEN); unsigned char *ptr = packed; pack_u8(&ptr, hdr->byte); // Remaining Length 1byte 值为0 mqtt_encode_length(ptr, 0); return packed; } // ACK 的编码实现 static unsigned char *pack_mqtt_ack(const union mqtt_packet *pkt) { unsigned char *packed = malloc(MQTT_ACK_LEN); // 4byte unsigned char *ptr = packed; pack_u8(&ptr, pkt->ack.header.byte); mqtt_encode_length(ptr, MQTT_HEADER_LEN); // 这里指还有2byte 内容是 pkt_id ptr++; // 因为 mqtt_encode_length 不会移动指针, 只会返回 Remaining Length 的长度, 而这里长度显然为1 pack_u16(&ptr, pkt->ack.pkt_id); return packed; } // CONNACK 的编码实现 static unsigned char *pack_mqtt_connack(const union mqtt_packet *pkt) { unsigned char *packed = malloc(MQTT_ACK_LEN); unsigned char *ptr = packed; pack_u8(&ptr, pkt->connack.header.byte); mqtt_encode_length(ptr, MQTT_HEADER_LEN); ptr++; pack_u8(&ptr, pkt->connack.byte); pack_u8(&ptr, pkt->connack.rc); return packed; } // SUBACK 的编码实现 static unsigned char *pack_mqtt_suback(const union mqtt_packet *pkt) { // 计算总长度 size_t pktlen = MQTT_HEADER_LEN + sizeof(uint16_t) + pkt->suback.rcslen; unsigned char *packed = malloc(pktlen + 0); unsigned char *ptr = packed; // 编码固定头 pack_u8(&ptr, pkt->suback.header.byte); // 剩余部分的长度 size_t len = sizeof(uint16_t) + pkt->suback.rcslen; // 变长表示剩余部分长度 int step = mqtt_encode_length(ptr, len); // 指针后移 ptr += step; // 剩余部分编码 pack_u16(&ptr, pkt->suback.pkt_id); for (int i = 0; i < pkt->suback.rcslen; i++) pack_u8(&ptr, pkt->suback.rcs[i]); return packed; } // PUBLISH 的编码实现 static unsigned char *pack_mqtt_publish(const union mqtt_packet *pkt) { // pktlen 至少有这么多: 头部至少2byte(1byte头 + 至少1byte的Remaining Length) // sizeof(uint16_t) 表示 topiclen 的长度, 因为 payloadlen 是不被编码到字节流中的 // topiclen 和 payloadlen 的内容 size_t pktlen = MQTT_HEADER_LEN + sizeof(uint16_t) + pkt->publish.topiclen + pkt->publish.payloadlen; // 这里是去除 fixed header 之外的内容长度 size_t len = 0L; // qos > 0, 说明有pkt_id, 需要 +2byte if (pkt->header.bits.qos > AT_MOST_ONCE) pktlen += sizeof(uint16_t); // 这里是通过剩余长度计算变长部分还需要的长度, 前面已经预留了1byte int remaininglen_offset = 0; if ((pktlen - 1) > 0x200000) remaininglen_offset = 3; else if ((pktlen - 1) > 0x4000) remaininglen_offset = 2; else if ((pktlen - 1) > 0x80) remaininglen_offset = 1; // 这里是总包长 pktlen += remaininglen_offset; unsigned char *packed = malloc(pktlen); unsigned char *ptr = packed; pack_u8(&ptr, pkt->publish.header.byte); // 除去 fixed header 之外剩余部分的长度 len += (pktlen - MQTT_HEADER_LEN - remaininglen_offset); // 编码 Remaining Length int step = mqtt_encode_length(ptr, len); ptr += step; // 编码 topiclen 和后续的 topic 内容 pack_u16(&ptr, pkt->publish.topiclen); pack_bytes(&ptr, pkt->publish.topic); // 当 QoS > 0 时, 编码 pkt_id if (pkt->header.bits.qos > AT_MOST_ONCE) pack_u16(&ptr, pkt->publish.pkt_id); // 编码 payload 的内容 pack_bytes(&ptr, pkt->publish.payload); return packed; } // 编码函数入口 unsigned char *pack_mqtt_packet(const union mqtt_packet *pkt, unsigned type) { if (type == PINGREQ || type == PINGRESP) return pack_mqtt_header(&pkt->header); return pack_handlers[type](pkt); }
socket 封装
我们计划创建一个单线程 TCP 服务器,使用 epoll 接口实现多路 I/O。Epoll 是继 select 和 poll 之后内核 2.5.44 添加的最新的多路复用机制,也是性能最高、连接数最多的多路复用机制,它在 BSD 和 BSD-like (Mac OSX) 系统中的对应机制是 kqueue。
我们需要定义一些函数来管理我们的socket descriptor。
src/network.h#include <stdio.h> #include <stdint.h> #include <sys/types.h> #include "util.h" // 地址族 #define UNIX 0 #define INET 1 // 设置为 non-blocking 模式 int set_nonblocking(int); // 将 TCP_NODELAY 设置为 true, 用来关闭 Nagle's algorithm, 关闭收包时的缓冲等待 int set_tcp_nodelay(int); // 创建 socket 服务的辅助函数 int create_and_bind(const char *, const char *, int); // 创建一个 non-blocking socket 并监听指定的地址和端口 int make_listen(const char *, const char *, int); // 接收链接并进行后续处理, 将链接分配到 epollfd int accept_connection(int);
我们定义了一些简单的辅助函数,用来创建和绑定 socket 端口,处理新链接并把 socket 设置为 non-blocking 模式(这样才能发挥 epoll 的复用能力)。
我不喜欢必须处理每个进出服务器的字节,在我写的涉及到TCP通信的程序中,我都会定义这两个函数:
ssize_t send_bytes(int, const unsigned char *, size_t)用于在while循环中持续发送数据,直到把数据全部发送完。正确捕获EAGAIN或EWOUDLBLOCK异常。ssize_t recv_bytes(int, unsigned char *, size_t)在while循环中获得任意长度的数据。正确捕获EAGAIN或EWOUDLBLOCK异常。
src/network.h// I/O 管理函数 // 在循环中发出所有数据, 避免内核buffer可用性造成的中断(EAGAIN EWOUDLBLOCK) ssize_t send_bytes(int, const unsigned char *, size_t); // 从 fd 中读取指定长度的数据进入 buffer ssize_t recv_bytes(int, unsigned char *, size_t);
socket 封装实现
接下来是 network.c 的实现。
src/network.c#define _DEFAULT_SOURCE #include <stdlib.h> #include <errno.h> #include <netdb.h> #include <unistd.h> #include <fcntl.h> #include <arpa/inet.h> #include <sys/un.h> #include <sys/epoll.h> #include <sys/timerfd.h> #include <netinet/in.h> #include <netinet/tcp.h> #include <sys/types.h> #include <sys/socket.h> #include <sys/eventfd.h> #include "network.h" #include "config.h" // 设置 non-blocking socket int set_nonblocking(int fd) { int flags, result; flags = fcntl(fd, F_GETFL, 0); if (flags == -1) goto err; result = fcntl(fd, F_SETFL, flags | O_NONBLOCK); if (result == -1) goto err; return 0; err: perror("set_nonblocking"); return -1; } // 设置 TCP_NODELAY 用以关闭 Nagle's algorithm int set_tcp_nodelay(int fd) { return setsockopt(fd, IPPROTO_TCP, TCP_NODELAY, &(int) {1}, sizeof(int)); } // UNIX socket 的绑定方法 // return fd // sockpath 文件路径 static int create_and_bind_unix(const char *sockpath) { struct sockaddr_un addr; int fd; // 创建 socket if ((fd = socket(AF_UNIX, SOCK_STREAM, 0)) == -1) { perror("socket error"); return -1; } // addr初始值全0 memset(&addr, 0, sizeof(addr)); // 赋值 addr.sun_family = AF_UNIX; strncpy(addr.sun_path, sockpath, sizeof(addr.sun_path) - 1); // 译者没有明白为何 unlink 会出现在此处 unlink(sockpath); // 绑定 socket if (bind(fd, (struct sockaddr*) &addr, sizeof(addr)) == -1) { perror("bind error"); return -1; } return fd; } // TCP socket 的绑定方法 // return fd // host TCP 地址 // port TCP 端口 static int create_and_bind_tcp(const char *host, const char *port) { struct addrinfo hints = { .ai_family = AF_UNSPEC, // 不指定协议族, 系统自定可以是IP4 或 IP6 .ai_socktype = SOCK_STREAM, // 面向流, 就是TCP .ai_flags = AI_PASSIVE // 被动模式, 可以监听任意地址端口 }; // result 是 getaddrinfo 提供的 addrinfo, rp 指如果绑定不成功, 可以变成下一个 addrinfo struct addrinfo *result, *rp; int sfd; if (getaddrinfo(host, port, &hints, &result) != 0) { perror("getaddrinfo error"); return -1; } for (rp = result; rp != NULL; rp = rp->ai_next) { // 先使用 rp 生成 socket sfd = socket(rp->ai_family, rp->ai_socktype, rp->ai_protocol); // 如果失败就下一个 rp if (sfd == -1) continue; // 设置 SO_REUSEADDR 这样关闭进程后可以重用端口 if (setsockopt(sfd, SOL_SOCKET, SO_REUSEADDR, &(int) { 1 }, sizeof(int)) < 0) perror("SO_REUSEADDR"); if ((bind(sfd, rp->ai_addr, rp->ai_addrlen)) == 0) { // bind 成功 break; } // 绑定失败记得关闭 socket close(sfd); } if (rp == NULL) { perror("Could not bind"); return -1; } freeaddrinfo(result); return sfd; } // 绑定入口 int create_and_bind(const char *host, const char *port, int socket_family) { int fd; if (socket_family == UNIX) fd = create_and_bind_unix(host); else fd = create_and_bind_tcp(host, port); return fd; } // 创建一个 non-blocking socket, 监听指定的地址端口 // return server file descriptor // host 地址或UNIX path // port 端口 // socket_family 地址族 AF_UNIX 或 AF_INET int make_listen(const char *host, const char *port, int socket_family) { int sfd; if ((sfd = create_and_bind(host, port, socket_family)) == -1) abort(); if ((set_nonblocking(sfd)) == -1) abort(); // 仅当 TCP链接时设置 TCP_NODELAY if (socket_family == INET) set_tcp_nodelay(sfd); // conf是本程序的配置文件 if ((listen(sfd, conf->tcp_backlog)) == -1) { perror("listen"); abort(); } return sfd; } // 接收链接后的处理 // return 客户端 fd // serversock 服务端fd int accept_connection(int serversock) { int clientsock; struct sockaddr_in addr; socklen_t addrlen = sizeof(addr); if ((clientsock = accept(serversock, (struct sockaddr *) &addr, &addrlen)) < 0) return -1; set_nonblocking(clientsock); // 仅当 TCP链接时设置 TCP_NODELAY if (conf->socket_family == INET) set_tcp_nodelay(clientsock); char ip_buff[INET_ADDRSTRLEN + 1]; // 将ip地址转为文本, 这里用作检查客户端地址 if (inet_ntop(AF_INET, &addr.sin_addr, ip_buff, sizeof(ip_buff)) == NULL) { close(clientsock); return -1; } return clientsock; } // 向 fd 发送指定长度的数据 // return 成功发送的数据长度 // fd 发送数据的目的 // buf 发送数据内容地址 // len 需要发送的数据长度 ssize_t send_bytes(int fd, const unsigned char *buf, size_t len) { // 发送数据的总长度 size_t total = 0; // 剩余需要发送数据的长度 size_t bytesleft = len; // 单次发送数据长度 ssize_t n = 0; while (total < len) { // 发送 bytesleft 长度的数据 n = send(fd, buf + total, bytesleft, MSG_NOSIGNAL); if (n == -1) { // 当 fd 被阻塞时, 直接返回已经发送的长度 if (errno == EAGAIN || errno == EWOULDBLOCK) break; else goto err; } total += n; bytesleft -= n; } return total; err: fprintf(stderr, "send(2) - error sending data: %s", strerror(errno)); return -1; } // 从 fd 中获得指定长度的数据 // retrun 成功读取的长度 -1 表示异常 // fd 数据源 // buf 存放结果的指针 // bufsize 期望读取的数据长度 ssize_t recv_bytes(int fd, unsigned char *buf, size_t bufsize) { // 单次获取的数据长度 ssize_t n = 0; // 获取的总数据长度 ssize_t total = 0; while (total < (ssize_t) bufsize) { // 使用 recv 函数获得最大 bufsize - total 的数据 if ((n = recv(fd, buf, bufsize - total, 0)) < 0) { // fd被阻塞了, 此时total的返回也许是小于 bufsize 的值, 调用者可以选择重试 if (errno == EAGAIN || errno == EWOULDBLOCK) { break; } else // 对于其他的异常则报错 goto err; } if (n == 0) return 0; buf += n; total += n; } return total; err: fprintf(stderr, "recv(2) - error reading data: %s", strerror(errno)); return -1; }
epoll 封装
为了让 epoll API能够更加简单易用。我对 epoll 进行了一些的封装,让我们就可以通过注册回调函数的方式来响应事件。
网络上有很多使用 epoll 的示例,大部分都是描述基本用法:注册一个 socket 并启动一个循环来监听事件,每当 socket 需要被读写时,调用一个函数来使用它们。这些例子当然简单好用,但是并没有告诉我们如何通过回调的方式使用 epoll。经过思考后,我发现可以使用 epoll_event 自带的 epoll_data 来解决这个问题:
typedef union epoll_data {
void *ptr;
int fd;
uint32_t u32;
uint64_t u64;
} epoll_data_t;正如你看到的,epoll_data 中有一个 void *,一个常常用来保存fd的 int,还有两个大小不同的 uint。我计划做一个自定义事件结构体,其中包括了fd、一些自定义数据和最关键的回调函数指针。然后我们可以把自定义事件结构体绑定到 epoll_data 的 void * 中,如此一来,每当事件发生时,我们都可以通过 epoll_data 获得所有我们需要的东西。
我想要定义两种类型的回调,一种是事件触发的回调,另一种是间隔触发的周期性回调。我们需要把 epoll 封装到一个自定义结构里,来实现这两种回调。对于这两种回调的处理,我们则会采用完全相同的方式:获得 epoll_data,在其中获得所有我们所需的数据和需要执行的回调函数。
接收数据包并使用 epoll_wait 处理的顺序图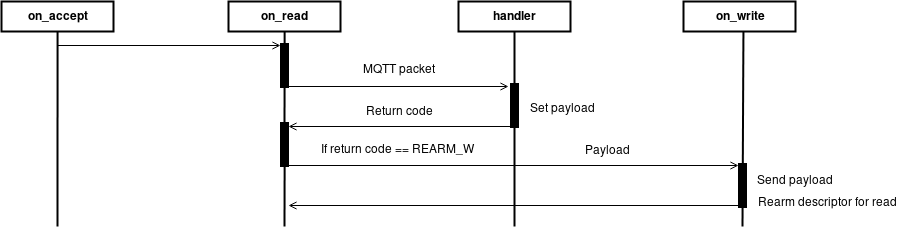
我们需要定义两种结构体和一种函数指针
- struct evloop 封装 epoll 实例的结构体,添加了各种参数用来实现我们的业务设计
- struct closure 上文中提到的自定义事件结构体,封装了各种事件参数和回调函数的指针
- **void callback(struct evloop , void ) 回调函数的接口,在 closure 里真正被执行的函数的接口
另外,我们需要在 .c 文件中实现一些对 evloop 的创建、删除和管理功能。
src/network.h// epoll 的业务包装,包括 epoll 实例本身和其他参数 // 使用 EPOLLONESHOT 处理事件,并且每次都需要手动重置,这样可以保证未来适应多线程架构 struct evloop { int epollfd; // epoll 实例fd int max_events; // 单次处理事件最大数量 int timeout; // 事件等待超时事件 int status; // 运行状态(是否运行中) struct epoll_event *events; // 事件数组, 用来接收 epoll_wait 获得的一组并发事件 // 周期性任务控制相关 int periodic_maxsize; // 周期性任务数组初始大小 int periodic_nr; // 当前周期性任务数量 struct { int timerfd; struct closure *closure; } **periodic_tasks; // 周期性任务列表 timerfd <-> closure } evloop; // 回调函数接口 typedef void callback(struct evloop *, void *); // 自定义事件结构体 struct closure { int fd; // 监听的 fd void *obj; // 存放一些需要的自定义数据 void *args; // 可以被callback使用的参数, 指向用户自定义结构, 实际调用时就是 call 的第二个参数 char closure_id[UUID_LEN]; // closure 的 UUID struct bytestring *payload; // callback 的结果, 可以被网络发送的数据流 callback *call; // 会被执行的回调函数 }; // evloop 的创建、初始化、销毁函数 struct evloop *evloop_create(int, int); void evloop_init(struct evloop *, int, int); void evloop_free(struct evloop *); // 一个阻塞的循环, 监听各种触发并执行对应的回调 int evloop_wait(struct evloop *); // 添加一个 closure, 其中包含一个回调函数 // 回调函数是单次触发的(边沿触发), 但是每次触发后都会被重置, 这样下次依然可以触发 void evloop_add_callback(struct evloop *, struct closure *); // 添加一个周期性的 closure, 间隔指定事件触发 void evloop_add_periodic_task(struct evloop *, int, unsigned long long, struct closure *); // 注销一个 closure, 删除对其 fd 的监听 int evloop_del_callback(struct evloop *, struct closure *); // 重置该 closure 对 read 事件的监听 int evloop_rearm_callback_read(struct evloop *, struct closure *); // 重置该 closure 对 write 事件的监听 int evloop_rearm_callback_write(struct evloop *, struct closure *); // 以下三个函数是对 epoll 原始API的封装, 供上方的函数调用 // EPOLL_CTL_ADD 的封装, 向 epoll 添加监听 int epoll_add(int, int, int, void *); // EPOLL_CTL_MOD 的封装, 可以重置 EPOLLONESHOT, 让 closure 下次仍被触发 int epoll_mod(int, int, int, void *); // EPOLL_CTL_DEL 的封装, 删除对某个 fd 的监听 int epoll_del(int, int);
epoll 封装实现
在头文件中定义了我们网络所需的各种工具函数后,接下来我们开始进行函数实现。
让我们先从最简单的开始,evloop 实例的创建、初始化和删除。他包括了这些内容:
epoll的fd即epollfd- 单次处理的最大事件数量
- 一个毫秒单位的超时时间
- loop是否正在运行的状态标识
- 动态大小的周期性任务数组
src/network.c/****************************** * EPOLL APIS * ******************************/ #define EVLOOP_INITIAL_SIZE 4 // 默认周期任务数组大小 // 创建并初始化 evloop struct evloop *evloop_create(int max_events, int timeout) { struct evloop *loop = malloc(sizeof(*loop)); evloop_init(loop, max_events, timeout); return loop; } void evloop_init(struct evloop *loop, int max_events, int timeout) { loop->max_events = max_events; loop->events = malloc(sizeof(struct epoll_event) * max_events); loop->epollfd = epoll_create1(0); // 这里创建 epoll 实例 loop->timeout = timeout; loop->periodic_maxsize = EVLOOP_INITIAL_SIZE; loop->periodic_nr = 0; loop->periodic_tasks = malloc(EVLOOP_INITIAL_SIZE * sizeof(*loop->periodic_tasks)); loop->status = 0; } // 释放 evloop void evloop_free(struct evloop *loop) { free(loop->events); for (int i = 0; i < loop->periodic_nr; i++) free(loop->periodic_tasks[i]); free(loop->periodic_tasks); free(loop); }
接着,我们需要实现三个包装 epoll API的函数,用来创建、修改和删除 epoll 对 fd 的监听。我们封装函数的目的是为所有的 epoll 监听都添加 EPOLLET 和 EPOLLONESHOT 标识。EPOLLET 标识可以让 epoll 工作在边沿触发模式,EPOLLONESHOT 标识则可以确保 epoll 对某个事件触发仅产生一次(然后我们通过手动重置的方式让其可以继续响应)。
这样的设置可以避免未来我们在使用多线程架构时,一次事件的传入会唤醒所有等待中的线程,这被称为惊群效应(thundering herd problem),不过这些都是后话,暂时可以不用深究。
src/network.c// 添加监听 // return 添加结果 // efd file descriptor // fd 被监听的 fd // evs 被监听的事件(可以是一个或一组) // data 传入自定义结构体 int epoll_add(int efd, int fd, int evs, void *data) { struct epoll_event ev; // 在 epoll_data 中设置 fd ev.data.fd = fd; // 注意 epoll_data 是 union, 如果有data并在此处设置, 那么上一行的 ev.data.fd 就不能再使用(是随机数) if (data) ev.data.ptr = data; // 将所有事件都设置为 边沿触发(EPOLLET) 和 触发后取消监听(EPOLLONESHOT) ev.events = evs | EPOLLET | EPOLLONESHOT; return epoll_ctl(efd, EPOLL_CTL_ADD, fd, &ev); } // 修改监听 主要目的是让触发过的事件可以再次被触发 int epoll_mod(int efd, int fd, int evs, void *data) { struct epoll_event ev; ev.data.fd = fd; // Being ev.data a union, in case of data != NULL, fd will be set to random if (data) ev.data.ptr = data; ev.events = evs | EPOLLET | EPOLLONESHOT; // 通过 EPOLL_CTL_MOD 可以让事件再次能被触发 return epoll_ctl(efd, EPOLL_CTL_MOD, fd, &ev); } // 删除监听 int epoll_del(int efd, int fd) { return epoll_ctl(efd, EPOLL_CTL_DEL, fd, NULL); }
这里有两件事需要注意:
第一,如前所述,
epoll_event中包括了一个union epoll_data,其中可以保存一个fd或 一个void *。我们选择了使用后者,传入了我们的closure,这其中包含了更多有用的信息,也包括fd在内。第二,刚才我们定义的添加和修改函数的第三个参数,可以接收一组事件,一般而言是
EPOLLIN或EPOLLOUT。同时我们添加了EPOLLONESHOT标识,这意味着当事件触发一次后就不会再次触发,除非我们手动重置该事件。这样做是为了保持对低级事件触发的某种程度的控制,并为将来的多线程实现留出空间。这篇文档精彩地阐述了epoll这种设计的好处,以及为什么最好使用EPOLLONESHOT标志。
epoll 循环实现
我们继续实现我们的封装,接下来是一些回调函数的注册、周期回调的注册以及主循环。
src/network.c// 添加回调 // loop loop封装实例 // cb 自定义事件封装 closure void evloop_add_callback(struct evloop *loop, struct closure *cb) { if (epoll_add(loop->epollfd, cb->fd, EPOLLIN, cb) < 0) perror("Epoll register callback: "); } // 添加周期事件 // loop loop封装实例 // seconds 以秒为单位的到期时间或触发周期 // ns 以纳秒为单位的到期时间或触发周期 // cb 自定义事件封装 void evloop_add_periodic_task(struct evloop *loop, int seconds, unsigned long long ns, struct closure *cb) { // 表示时间间隔或时间点的结构 struct itimerspec timervalue; int timerfd = timerfd_create(CLOCK_MONOTONIC, 0); memset(&timervalue, 0x00, sizeof(timervalue)); // 设置初始的到期时间 (多久后执行 timervalue.it_value.tv_sec = seconds; timervalue.it_value.tv_nsec = ns; // 设置初始的触发周期 (间隔多久执行 timervalue.it_interval.tv_sec = seconds; timervalue.it_interval.tv_nsec = ns; // 设置好 timer if (timerfd_settime(timerfd, 0, &timervalue, NULL) < 0) { perror("timerfd_settime"); return; } // 将 timer 添加到 epoll, 让其能够触发 struct epoll_event ev; ev.data.fd = timerfd; ev.events = EPOLLIN; if (epoll_ctl(loop->epollfd, EPOLL_CTL_ADD, timerfd, &ev) < 0) { perror("epoll_ctl(2): EPOLLIN"); return; } // 将周期性任务的信息绑定到 loop // 如果周期性任务的数量大于periodic_maxsize, 动态扩容 if (loop->periodic_nr + 1 > loop->periodic_maxsize) { loop->periodic_maxsize *= 2; loop->periodic_tasks = realloc(loop->periodic_tasks, loop->periodic_maxsize * sizeof(*loop->periodic_tasks)); } // 存储周期性任务的内容 timerfd 和 自定义事件 loop->periodic_tasks[loop->periodic_nr] = malloc(sizeof(*loop->periodic_tasks[loop->periodic_nr])); loop->periodic_tasks[loop->periodic_nr]->closure = cb; loop->periodic_tasks[loop->periodic_nr]->timerfd = timerfd; // 记录当前绑定了多少周期性任务 loop->periodic_nr++; } // epoll 主循环 int evloop_wait(struct evloop *el) { int rc = 0; // 返回值 int events = 0; // 单次触发事件数 long int timer = 0L; // 拿到我们周期性事件的 timerfd int periodic_done = 0; // 标记是否是周期性事件并且已经执行 while (1) { // 等待事件发生 events = epoll_wait(el->epollfd, el->events, el->max_events, el->timeout); // 有异常 if (events < 0) { // 系统中断, 暂时不管 if (errno == EINTR) continue; // 确实出了问题, 结束循环 rc = -1; el->status = errno; break; } // 循环处理每个事件 for (int i = 0; i < events; i++) { // 错误校验 检查是否是错误事件 检查是否不是输入输出事件 if ((el->events[i].events & EPOLLERR) || (el->events[i].events & EPOLLHUP) || (!(el->events[i].events & EPOLLIN) && !(el->events[i].events & EPOLLOUT))) { // 总之这个 fd 上出现了一些异常, 我们把链接关了 perror ("epoll_wait(2)"); shutdown(el->events[i].data.fd, 0); close(el->events[i].data.fd); el->status = errno; continue; } // 拿到我们的 closure struct closure *closure = el->events[i].data.ptr; // 标记没有完成周期事件 periodic_done = 0; // 当没有被标识完成时, 循环查找我们存储的周期事件 for (int i = 0; i < el->periodic_nr && periodic_done == 0; i++) { // 找到了 if (el->events[i].data.fd == el->periodic_tasks[i]->timerfd) { // 拿到 closure struct closure *c = el->periodic_tasks[i]->closure; // 读 timerfd (void) read(el->events[i].data.fd, &timer, 8); // 执行回调 c->call(el, c->args); // 标记完成 periodic_done = 1; } } if (periodic_done == 1) continue; // 并不是完成了某个周期性事件 那就是触发事件了 这里执行回调 closure->call(el, closure->args); } } return rc; } // 重置该 closure 对 read 事件的监听 int evloop_rearm_callback_read(struct evloop *el, struct closure *cb) { return epoll_mod(el->epollfd, cb->fd, EPOLLIN, cb); } // 重置该 closure 对 write 事件的监听 int evloop_rearm_callback_write(struct evloop *el, struct closure *cb) { return epoll_mod(el->epollfd, cb->fd, EPOLLOUT, cb); } // 删除回调函数 int evloop_del_callback(struct evloop *el, struct closure *cb) { return epoll_del(el->epollfd, cb->fd); }
在我们之前的所有代码中,evloop_wait 是最有意思的,他启动一个循环不停监视 epoll_wait,执行错误检查,区分本次触发是周期性的自动触发或是读写触发,然后执行我们设置的回调函数。
结尾
我们的代码越写越多,这次我们又添加了一个模块。
此时我们的文件结构是这样的:
sol/
├── src/
│ ├── mqtt.h
| ├── mqtt.c
│ ├── network.h
│ ├── network.c
│ ├── pack.h
│ └── pack.c
├── CHANGELOG
├── CMakeLists.txt
├── COPYING
└── README.md